目次
こんにちは、リクルートATL(アドバンスドテクノロジーラボ)でIoT関連の研究を行っている菅原です。
IoTデバイスは多くのケースにおいて、省電力で稼働するためバッテリー駆動を利用しています 。
バッテリー駆動は容易な電力供給方法としては手軽ですが、電子錠の操作リモコンのような、日頃定期的に利用するデバイスへの利用としては、常にバッテリー残量を意識しなければ支障が出てしまうため不向きです。
そこでいつでも確実に利用するために、電子錠の操作リモコンが環境発電稼働で実現可能かどうかを、消費電力観点において検証・考察しました。
考察は、電子錠の操作リモコンとしてメジャーなBLE通信での操作を前提にし、その中でも通信手順の少ない(最も消費電力が少ない)ブロードキャスト通信を環境発電で稼働させるという環境で検討しました。
BLE ブロードキャストリモコンが通信時に消費する電力量
ブロードキャスト送信に必要な電力量の測定
測定環境
以下の測定環境を用い、ブロードキャストを送信する際に必要な電力量を測定します。
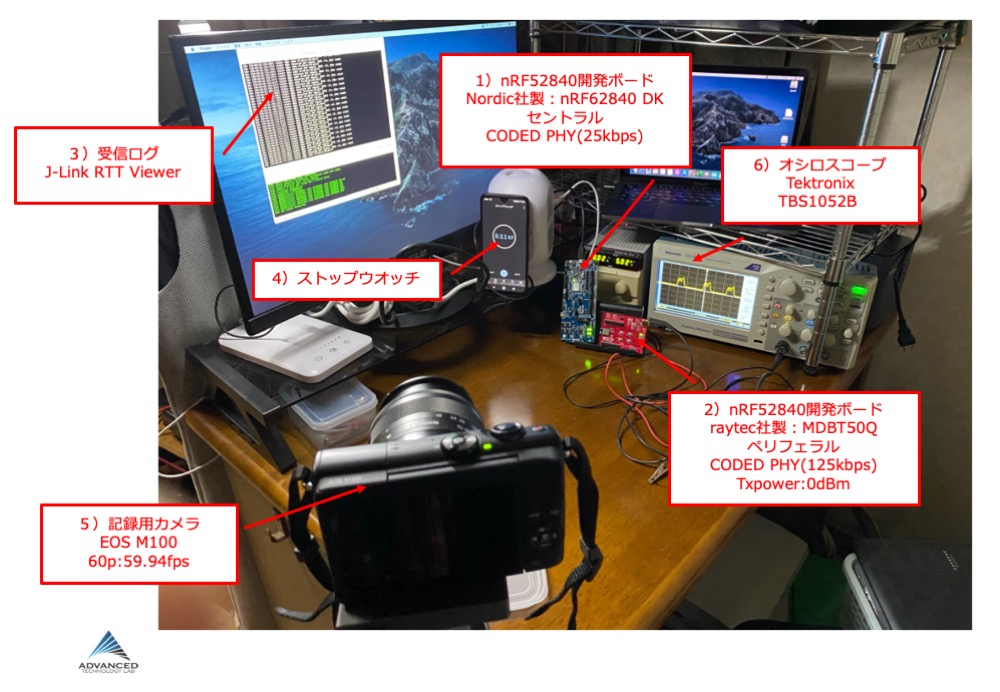
図1:検証に使用した機器
1)Nordic nRF52340の開発ボード:セントラル設定1台
BLEの設定 Phy:coded phy(125kbps)
2)Nordic nRF52340の開発ボード:ペリフェラル設定1台
ブロードキャスト送信パケット設定
-BLE V5.0 プライマリーアドバタイジングパケット、セカンダリーアドバタイジングパケット
-パケット間隔最小設定値:20ms、ディレイが=<10ms
-Phy:coded phy(125kbps)、TxPower:0dbm
3)セントラル設定のNordic nRF52340の開発ボードをパソコンに接続し受信ログを取得する
-ロギングパケット:BLE V5.0 coded セカンダリーアドバタイジングパケット
4)ストップウォッチ用スマートフォン
5)記録用カメラ
6)オシロスコープ
ブロードキャスト通信に必要な電力
・ブロードキャスト送信に要する時間(T3)の測定
プライマリアドバタイジングパケット送信(T1)からセカンダリアドバタイズパケット送信(T2)までに要する時間を測定します。
下図のように測定結果は、0.01s でした。
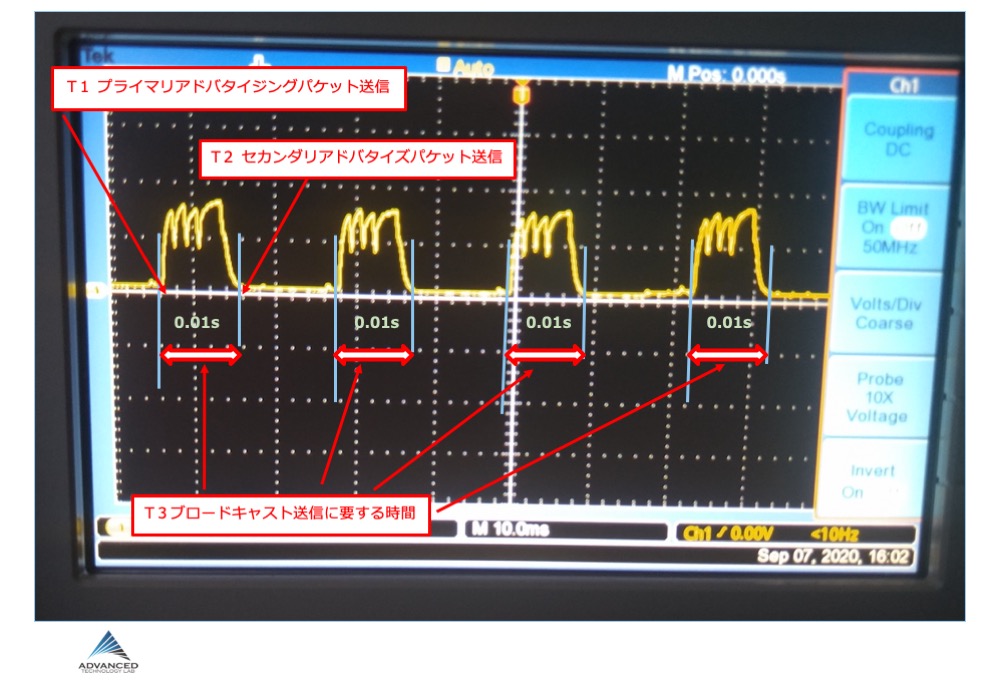
図2
・待機時間(T4)の測定
セカンダリアドバタイジングパケット受信後からプライマリアドバタイジングパケットを送信するまでの待機時間(T4)を測定します。
下図のように測定結果は、0.01s でした。
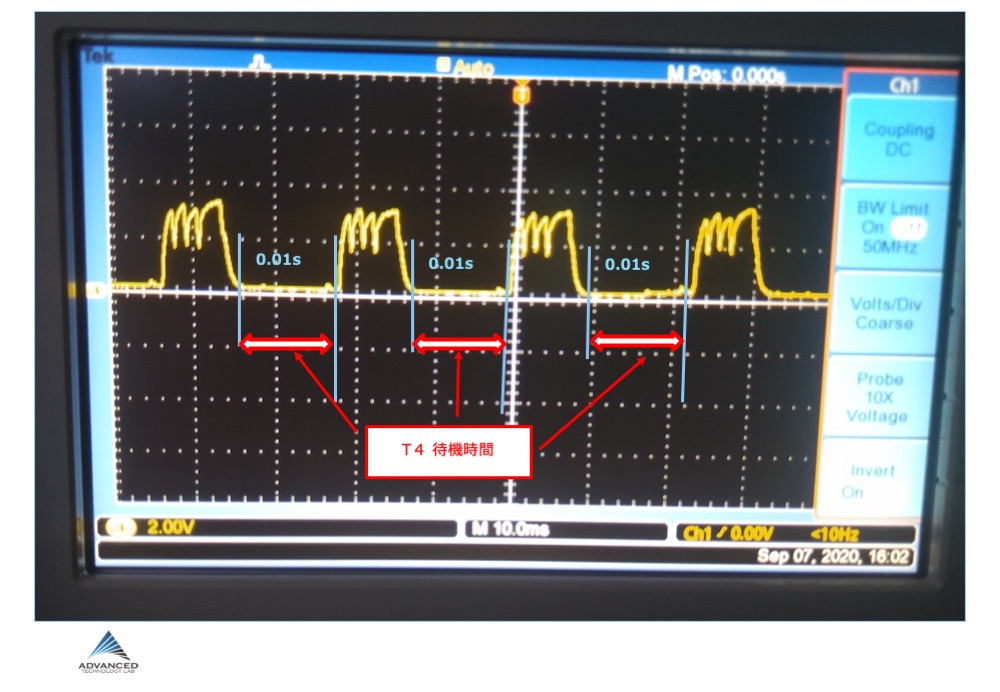
図3
・ブロードキャスト送信時の電力(W1)の算出
ブロードキャスト送信時の電力(W1)を算出します。
ブロードキャスト送信時の測定電圧は下図のように、3.8Vです。
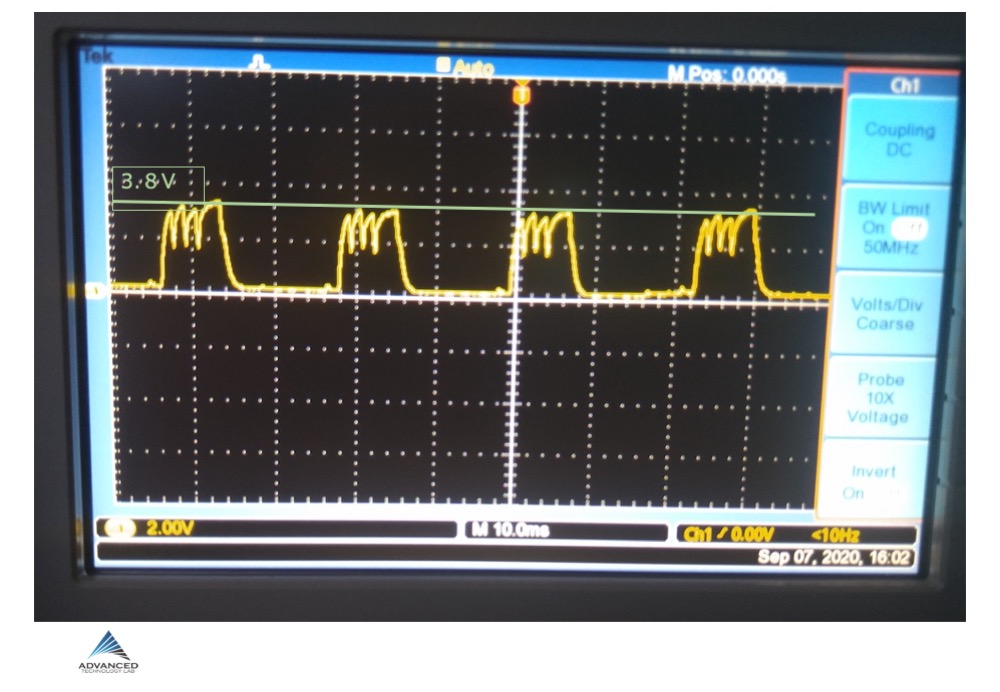
図4
シャント抵抗が1KΩなので、送信電流:3.8V/1kΩ=3.8mA
5Vで駆動しているので、送信時の消費電力は 3.8mA x 5V = 19.0mW となります。
・待機時間の電力の算出(W2)
待機時間の電力(W2)を算出します。
待機時の測定電圧は数の様に0.2Vです。
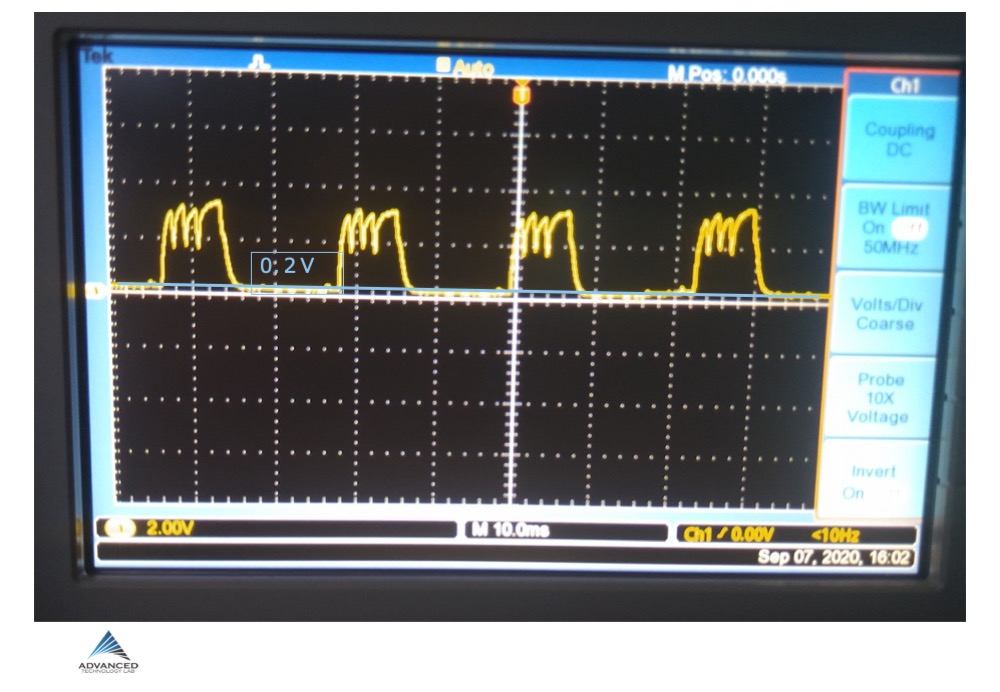
図5
シャント抵抗が1KΩなので、待機電流:0.2V/1kΩ=0.2mA
5Vで駆動しているので、待機時消費電力:0.2mA x 5V = 1.00mW となります。
プログラムロードに必要な電力
・プログラムロード時間(T8)の算出
電源ON(T5)から最初のセカンダリアドバタイジングパケット受信までの時間(T6)とブロードキャスト送信時間(T3)より、プログラムロード時間(T8)を算出します。
<T8 プログラムロード時間>=<T5からT6の時間(T7)>ー<T3 ブロードキャスト送信時間>
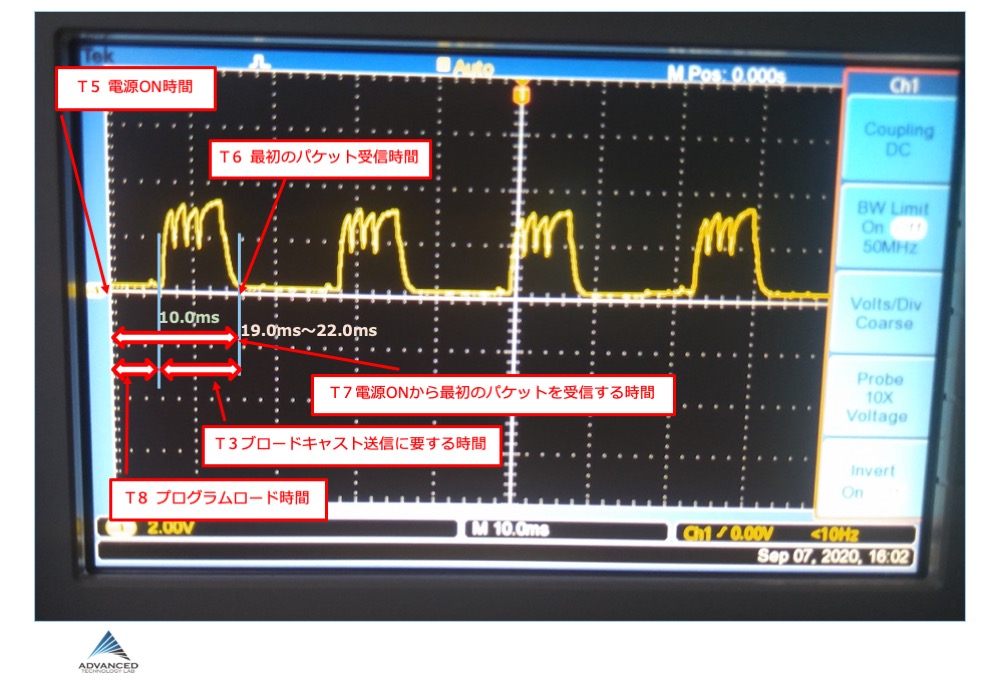
図6
複数回測定し、結果は0.09s〜0.12s でした。
T8 プログラムロード時間は、0.09s 〜 0.12 の中間値(0.09s + 0.12s)/ 2 = 0.11s とします。
・プログラムロード時の電力(W3)の算出
データシートの値で算出します。
nRF52840 Product Specification v1.1 Pⅱ Feature list から抜粋
ARM Cortex -M4 32-bit processor with FPU, 64 MHz, 52 μA/MHz running CoreMark from flash memory
以上より、
マイコンの消費電流 52μA/MHz x 64MHz = 3328μA = 3.328mA
5Vで駆動しているので、マイコンの消費電力 3.328mA x 5V = 16.64mW となります。
ブロードキャスト受信に必要な時間
・ブロードキャスト受信に必要な時間(T9)の測定
測定環境を用い、ブロードキャストを受信する際に、送信ブロードキャストをどのくらいの時間送信することで受信側が100%近く受信できるかを測定します。
A ペリフェラル設定の開発ボードの電源をONにする
・ペリフェラル設定の開発ボードの電源ON時の電源LEDが点灯する時刻をカメラに記録し、時間を測定
B セントラル設定の開発ボードが最初のセカンダリアドバタイジングパケットを受信する
・セントラル設定の開発ボードが最初のセカンダリアドバタイジングパケットを受信した時刻をカメラに記録し、時間を測定
A、Bの測定を10回行った結果
| 1回目 | 2回目 | 3回目 | 4回目 | 5回目 | 6回目 | 7回目 | 8回目 | 9回目 | 10回目 | |
|---|---|---|---|---|---|---|---|---|---|---|
| AからBまでの時間(s) | 0.10 | 0.13 | 0.10 | 0.11 | 0.10 | 0.13 | 0.10 | 0.13 | 0.13 | 0.10 |
電源ONから最初のパケット受信までの時間は、最長0.13sと測定されました。
以上より、安全率を考慮して、測定結果の1.5倍をブロードキャスト受信に必要な時間とします。
・0.13s x 1.5 = 0.20S
T9 ブロードキャスト受信に必要な時間は0.20sとします。
・BLE ブロードキャストリモコン通信成功に必要な送信回数(N1)の算出
上記の算出値を使ってパケット送信回数を算出します。
0.20s [T9] = 0.11 [T8] + n x 0.01 [T3] + (n – 1) x 0.01 [T4]
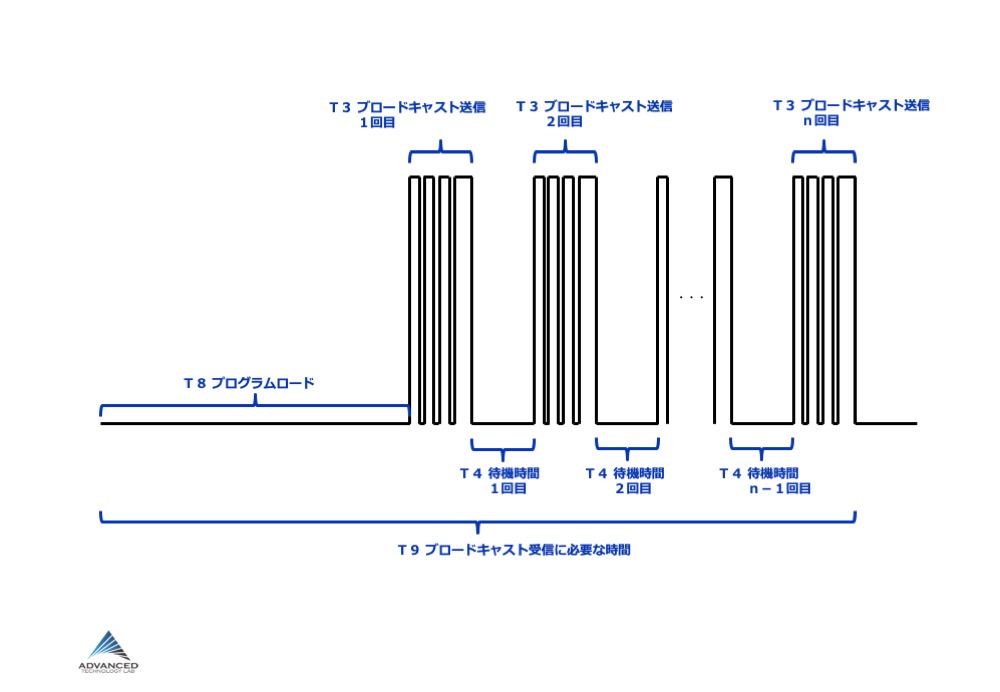
図7
n = 5
0.2sのブロードキャストパケット送信時間で5サイクル(N1)の送信ができます。
ブロードキャスト送信に必要な電力量
以上の結果より
0.11s [T8] x 16.64mW [W3] + 5 [N1] x (0.01s [T3] x 19.00mW [W1]) + (5 [N1] – 1) x (0.01s [T4] x 1.00mW [W2]) = 2.8204mWs
ブロードキャスト送信に必要電力量は2.82mWsとなります。
環境発電での実現性
以下は、本案件で利用可能性のある環境発電デバイスです。
| 発電デバイス | メーカ | 型番 | 最大発電電力 |
|---|---|---|---|
| 振力電池 | 音力発電 | SRD-001-BG | 0.2mWs |
| 電磁誘導発電素子 | エンオーシャン | ECO200 | 0.21mWs |
| 磁歪式振動発電デバイス | 金沢大学 | V-REPORT(小) | 1.0mWs |
| V-REPORT(中) | 5.0mWs | ||
| 無線押しボタンスイッチ | オムロン | A2W-RAN-WC1-JP | 1mW |
| バッテリーレス押しボタンスイッチ | 富士電機 | XB5RMB01 | 3mW |
(※セル色が黄色い部分は、必要電力量の2.82mWs以上を供給することが可能なデバイスを表しています)
以上のように、必要電力量の2.82mWsを供給することが可能なデバイスは存在するため、電子錠の操作リモコンは環境発電稼働BLEリモコンで実現可能といえます。
考察
BLE ブロードキャストリモコンは、稼働の際に0.2ms稼働が必要で、その際に2.82mWsの電力を使用することがわかりました。
これを実現する環境発電デバイスは、一般的に存在するため、環境発電稼働BLEリモコンは実現可能性が高いといえると思います。
この結果から、電力供給を気にすることなく操作が可能なデバイスを設計でき、様々な場面での利用が期待できることがわかります。
次フェーズとしては、BLE ブロードキャストリモコンのコマンド送信実装検証をしていきたいと思います。