目次
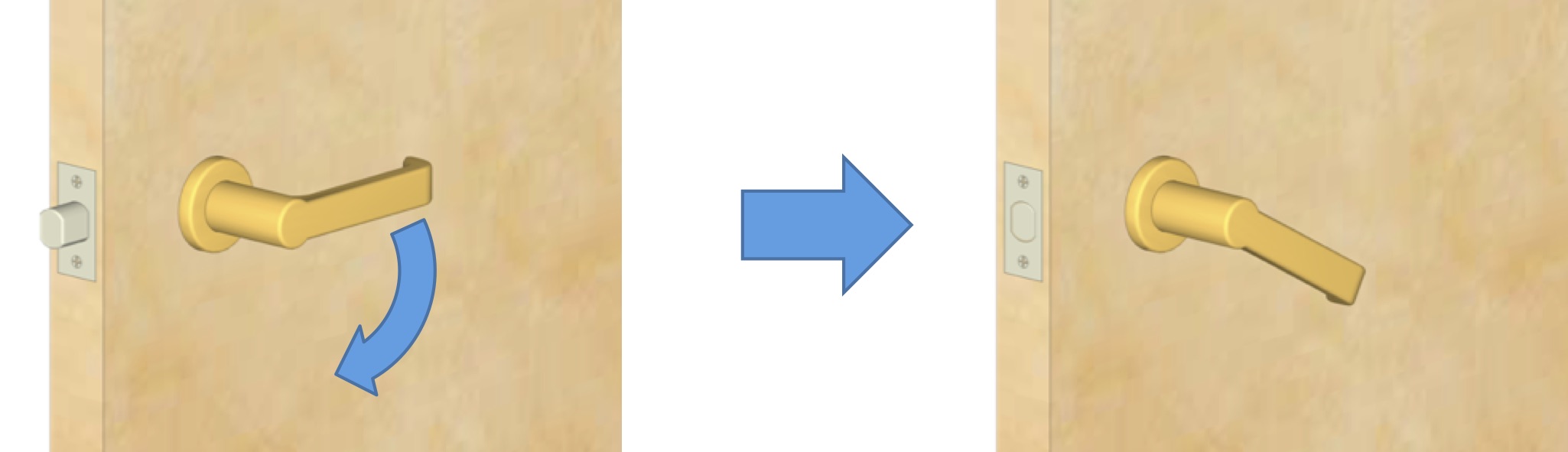
こんにちは、リクルートATL(アドバンスドテクノロジーラボ)でIoT関連の研究を行っている菅原です。 以前こちらの記事でご報告した後付けスマートロックは、ドア内側に設置されているサムターンを稼働させることによって鍵の解施錠を行う仕様の鍵に対するものでしたが、図1のようにドア内側のドアレバーを下げるだけで解錠する仕様のものもメジャーな存在であるのにもかかわらず、対応するスマートロックは存在していません。
図1
 そこで、この仕様に対応した後付けスマートロックの開発を検討してみたいと思います。
そこで、この仕様に対応した後付けスマートロックの開発を検討してみたいと思います。
設置対象の鍵の仕様
今回対応対象とする鍵の仕様は、以下の通りです。 ・解錠状態の継続時間 等をもとにして自動施錠が行われる ・解錠を外側から行う場合は、シリンダーキーやカードキー 等で解錠し入室する ・解錠を内側から行う場合は、ドアレバーを下げて解錠し退室する
検討対象のスマートロックの仕様要件
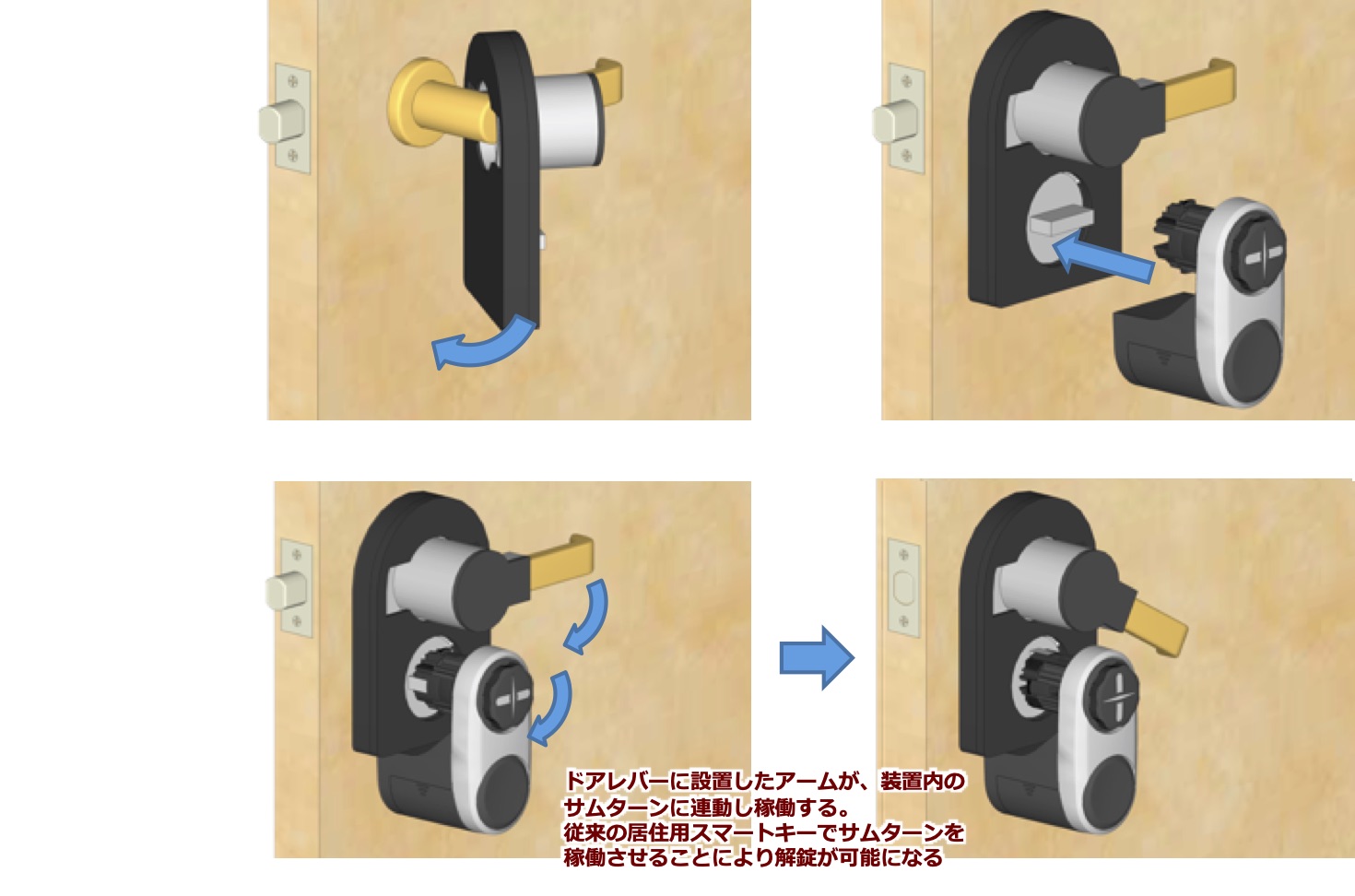
対応するスマートロックはドアの内側に設置され、解錠時のみドアレバーを下げる動作を行う必要があります。 実現するためには、 ・ドアレバーを稼働させるための機構 ・上記の機構に対する制御および稼働が可能な動力 を開発する必要がありますが、後者の動力を既存のサムターン用スマートロックで賄えるようにすることで、 ・サムターンで動力を伝達できるドアレバーを稼働させるための機構 の開発とすることができます。 イメージは図2のようになります。
図2
新型スマートロックの実用性の検証ポイント
ポイント1 高トルク稼働時の完了時間の妥当性
既存のサムターン用スマートロックを動力(46.1cN・m)とするため、ドアレバーを稼働させるためのトルク(84.0cN・m ※今回テスト利用したドアレバーの実測値)が圧倒的に足りません。 トルクアップするために、サムターン用スマートロックが動力を伝えるサムターンとドアレバー稼働用機構との間を減速ギアで接続しようと考えましたが、その副作用として稼働スピードが遅くなってしまいます。そこで、上記の方法で高トルク稼働を行った時の完了時間の妥当性の確認が重要となります。
ポイント2 設置誤差を加味した稼働安定性の確保
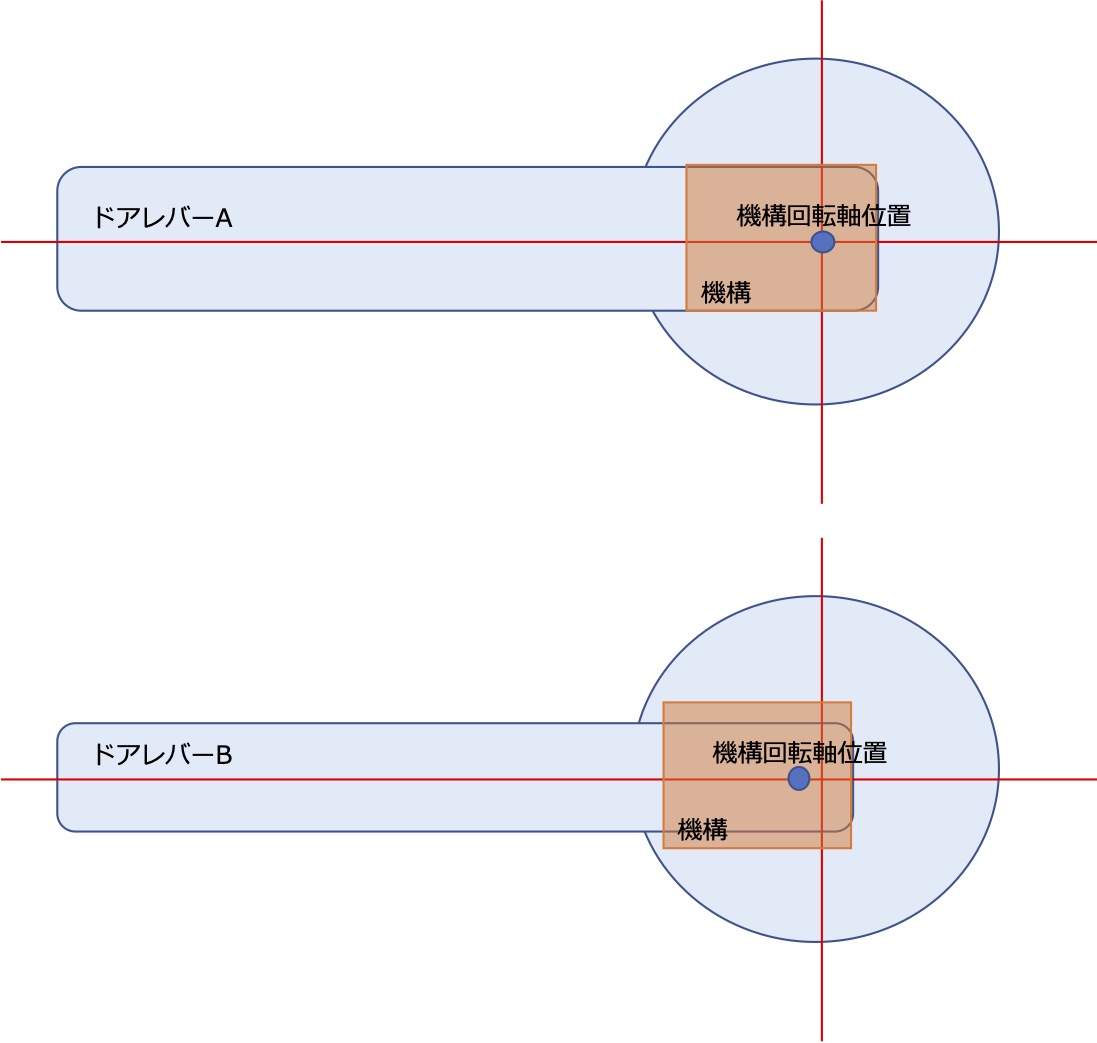
既存のドアレバーに後付けする機構ですので、ドアレバーの回転軸とドアレバーを稼働させるための機構(以下、機構)の回転軸の位置ずれにより稼働が不安定になります。よって、設置位置ずれによる稼働の変化の確認も重要となります。
検証概要
上記2つのポイントを検証するために、以下の要領でドアレバーに対する回転軸を合わせて機構を設置し、稼働テストを行います。 ・機構の稼働のトルクを増強するための減速ギアとして、「タミヤ テクニクラフトシリーズ No.1 遊星ギヤーボックスセット」を使用 ・動力として、スマートロックで利用される、「同興 12GAN20-298 6V 50RPM」(トルク測定値 10.50cN・m)を使用 
ポイント1 高トルク稼働時の完了時間の妥当性 検証概要
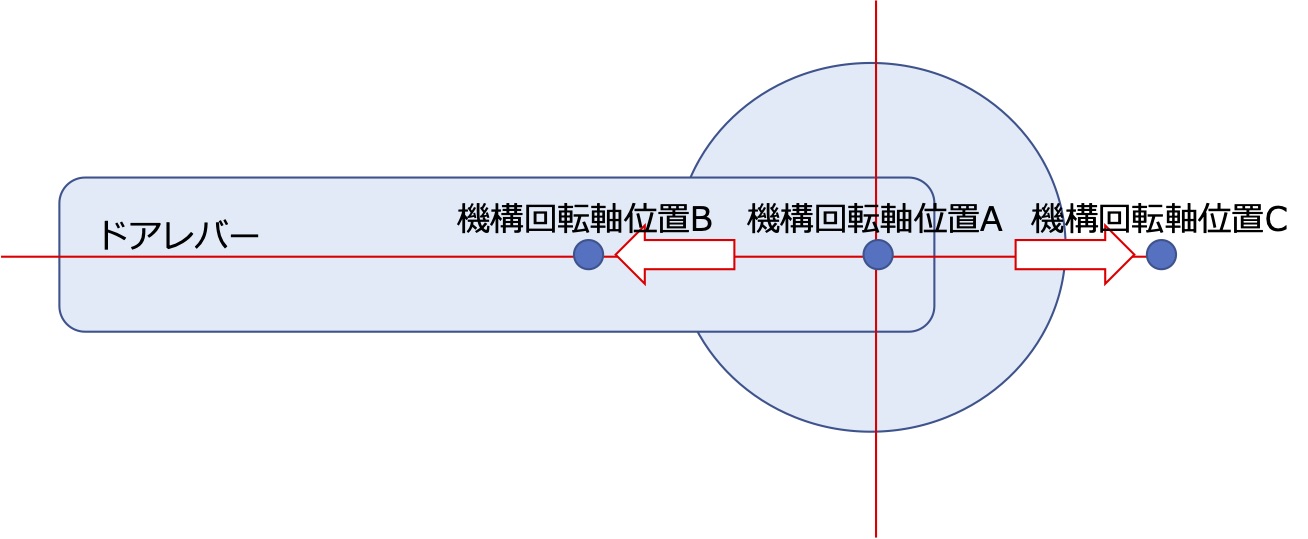
上記の検証環境(図3、回転軸位置A)で、減速ギアを複数のギア比で入れ替えて稼働時間の測定を行います。 これにより、現実的な稼働時間で稼働可能なギア比を割り出します。
ポイント2 設置誤差を加味した稼働安定性の確保 検証概要
ポイント1検証結果より割り出された最適な減速比の減速ギアを使用し、左右の位置ずれ(図3、回転軸位置B,C)により稼働不可になる位置を測定します。 これにより、設置誤差による稼働精度を測定し、機構設計に対するインプットとします。
図3
検証結果
ポイント1 高トルク稼働時の完了時間の妥当性 検証結果
ドアレバーを稼働させる為には、伝達力の損失なしで動力としてトルク84.0cN・mが必要です。従って、伝達力が損失する前提で考えると1.5倍以上(126.0cN・m)のトルクが出せ、製品として設定が可能な減速ギア比 16:1、20:1、25:1 で測定を行いました。但し、実際の環境では機構をサムターン用スマートロックが稼働させるため、機構で必要となるギア比(以下、機構ギア比)は 4:1、5:1、6:1となります。 以下、測定結果と稼働状況の動画をご覧ください。
表1

ポイント2 設置誤差を加味した稼働安定性の確保 検証結果
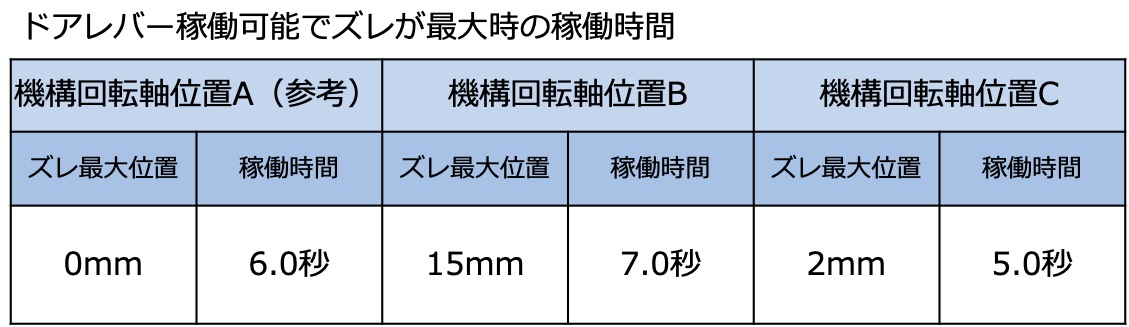
表1の結果により、減速ギア比 16:1が最適値でしたので、これを使用して左右にずらし、ドアレバーが稼働しなくなる限界位置を測定します。 以下、測定結果です。
表2
検証考察
ポイント1 高トルク稼働時の完了時間の妥当性 検証考察
機構ギア比 4:1、5:1、6:1 いずれもドアレバーの稼働は可能で、稼働時間もサムターン用電子錠と同等の性能でした。 従って、今後さまざまなドアレバーの稼働テストは必要ですが、本件で構想されたスマートロックは十分実用性があると判断しました。
ポイント2 設置誤差を加味した稼働安定性の確保 検証考察
後付けスマートロックの機構はその性質上、厳密な位置合わせをして設置することが難しくなります。また、設置されるドアレバーにも規格がありませんので、多様なサイズであることが想定できます。 そのため、機構には設置誤差を考慮した設計が必要となります。 今回の測定結果では、ドアレバー側への設置誤差(図3、機構回転軸位置B)として15mmが許容されていますが、反対側(図3、機構回転軸位置C)には、2mmとほとんど許容されていません。 従って、図4のように太めのドアレバーでフィットする機構を設計すれば、それよりも細いレバーに対しても稼働許容範囲で設置することが可能となります。
図4
評価
以上より、本件で検討したスマートロックの実用性を確認することができました。 今後は、この検証結果を反映したプロトタイプの設計・作成を行い、より実用性の向上を進めていきたいと思います。 以上、新型スマートロック考案のレポートとなります。